TP Java – Interfaces (1)
Objectif
- Écrire un programme qui ne peut pas être réalisé avec l'héritage de classe seul (Java interdit l'héritage multiple, plus précisement plusieurs extends sur la même classe), mais qui fonctionne grâce aux interfaces.
- On modélise des capacités orthogonales (voler, nager, rouler) que certains robots peuvent cumuler.
Durée estimée : 1/2 heure(s)
Idée clé
- Avec l'héritage classique (
extends), une classe ne peut avoir qu'un seul parent. - Ici, un robot peut cumuler plusieurs capacités (voler et nager et rouler).
- Impossible en héritage de classes seules → nécessaire d'utiliser des interfaces.
Étape 1 - Définir les interfaces de capacités
L'objectif de cette première étape est de modéliser des capacités indépendantes :
- une capacité à voler,
- une capacité à nager,
- une capacité à rouler.
Ces capacités seront représentées sous forme d'interfaces, afin que différents types de robots puissent cumuler plusieurs comportements.
Consignes
-
Créez trois fichiers Java séparés :
Flyable.javaSwimmable.javaDrivable.java
-
Dans chaque fichier, déclarez une interface publique contenant une seule méthode abstraite :
- cette méthode représente l'action principale de la capacité (voler, nager, ou rouler).
-
Ne mettez aucun attribut ni code d'implémentation à l'intérieur des interfaces.
Créez trois fichiers d'interface : Flyable.java, Swimmable.java, Drivable.java.
Étape 2 - Implémentations concrètes (robots)
Objectif : créer plusieurs classes de robots qui implémentent les interfaces de l'étape 1, avec la possibilité pour un même robot de cumuler plusieurs capacités.
Consignes
-
Créez au moins trois classes de robots mono-capacité (ex. un robot qui vole, un qui nage, un qui roule).
- Chaque classe implémente exactement une interface parmi celles définies à l'étape 1.
- Chaque robot possède un identifiant immuable (ex.
idpassé par le constructeur).
-
Créez au moins une classe multi-capacités (implémente au moins deux interfaces).
- Le but est de démontrer le cumul de capacités impossible via héritage multiple, mais possible grâce aux interfaces.
-
Dans chaque classe :
-
Ajoutez un constructeur qui initialise l'identifiant.
-
Implémentez chaque méthode de l'interface correspondante en produisant une sortie console explicite.
Exemple:
System.out.println("Drone " + id + " décolle et vole."); -
Ne mettez aucune logique réseau/IO ni temporisation : gardez des effets simples et observables (impressions console).
-
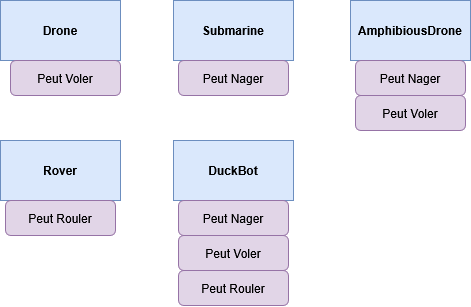
Visualisation
Proposition visuelle des robots :
Étape 3 - Contrôleur polymorphe (utilise uniquement les interfaces)
But de l'étape
Écrire une classe de "contrôle" qui orchestre des actions sans connaître les classes concrètes des robots.
Elle ne manipule que des types d'interface (Flyable, Swimmable, Drivable).
Consignes
- Créez une classe
MissionControldans un fichierMissionControl.java. - Déclarez trois méthodes publiques et statiques :
- une qui déclenche le vol pour une liste d'objets
Flyable, - une qui déclenche la nage pour une liste d'objets
Swimmable, - une qui déclenche le roulage pour une liste d'objets
Drivable.
- une qui déclenche le vol pour une liste d'objets
- Chaque méthode :
- reçoit en paramètre une liste typée par l'interface correspondante (ex.
List<Flyable>), - itère sur cette liste (boucle for),
- appelle la méthode de l'interface (ex.
fly()), sans cast et sans instanceof, - ne fait aucune hypothèse sur la classe concrète (pas de
newd'un robot ici, pas de références àDrone,Rover, etc.).
- reçoit en paramètre une liste typée par l'interface correspondante (ex.
- La classe
MissionControlne doit dépendre que des interfaces de l'étape 1 (et non des objets/robots de l'étape 2) et des types de liste Java.
Programme principal
Remarquez qu'un même objet peut appartenir à plusieurs listes (car il implémente plusieurs interfaces).
C'est une proposition du programme principale, ce qui peut vous permettre d'avoir une visions global de ce qu'on attend de vous
// Main.java
import java.util.ArrayList;
import java.util.List;
public class Main {
public static void main(String[] args) {
Drone d1 = new Drone("D1");
Submarine s1 = new Submarine("S1");
Rover r1 = new Rover("R1");
AmphibiousDrone a1 = new AmphibiousDrone("A1");
DuckBot x1 = new DuckBot("X1");
List<Flyable> fliers = new ArrayList<>();
List<Swimmable> swimmers = new ArrayList<>();
List<Drivable> drivers = new ArrayList<>();
// Inscription selon capacités :
fliers.add(d1);
fliers.add(a1);
fliers.add(x1);
swimmers.add(s1);
swimmers.add(a1);
swimmers.add(x1);
drivers.add(r1);
drivers.add(x1);
// Contrôle polymorphe :
System.out.println("=== Séquence de vol ===");
MissionControl.startFlight(fliers);
System.out.println("=== Séquence de nage ===");
MissionControl.startSwim(swimmers);
System.out.println("=== Séquence de roulage ===");
MissionControl.startDrive(drivers);
}
}
Sortie attendue (exemple)
=== Séquence de vol ===
Drone D1 décolle et vole.
AmphiDrone A1 vole au-dessus de l'eau.
DuckBot X1 bat des ailes mécaniques.
=== Séquence de nage ===
Sous-marin S1 plonge et nage.
AmphiDrone A1 amerrit et nage.
DuckBot X1 nage sur le lac.
=== Séquence de roulage ===
Rover R1 se déplace sur terrain.
DuckBot X1 se déplace sur roues.
Bonus (facultatif)
- Ajouter une interface
Maintainableavecvoid checkup(), et ne l'implémenter que sur certains robots. - Ajouter une nouvelle capacité (
Hoverable) et un robot qui l'implémente en plus de celles existantes : aucun changement dansMissionControltant que vous n'avez pas besoin d'une séquence dédiée.